Комплект оборудования | Подготовка к сканированию | Начало работы с 3D‑сканером | Процесс сканирования | Импорт и первичная обработка данных | Итоги
Измерить здание с помощью геодезического лазерного 3D‑сканера – это быстро, удобно, просто и гораздо эффективнее в сравнении с традиционными методами съемки. Вы убедитесь в этом прямо сейчас: мы покажем пошагово процесс оцифровки объекта и первичной обработки полученных данных, и остановимся на преимуществах и отдельных нюансах применения наземного лазерного сканирования.
Напомним, что наземные 3D‑сканеры и специализированное ПО позволят оптимизировать решение следующих задач:
-
реконструкция и перепланировка зданий и помещений;
-
реставрация объектов культурного наследия;
-
реверс‑инжиниринг крупногабаритных изделий и оборудования;
-
воссоздание моделей инженерных сетей;
-
контроль отклонений геометрии;
-
BIM‑моделирование.
Хотите проверить, помогут ли 3D‑технологии в решении ваших задач? Закажите тестовое сканирование и демонстрацию оборудования!
Для демонстрации сканирования мы выбрали Мемориальную мечеть на Поклонной горе в Москве, недалеко от офиса iQB Technologies. Наша цель – получить цифровую модель всего фасада объекта.

Стандартный комплект оборудования:
-
3D‑сканер FARO Focus S150 в кейсе;
-
штатив для сканера;
-
дополнительно: набор сфер и штативы к ним.
Не то чтобы сферы критически требовались для данного объекта – мы использовали их скорее для того, чтобы показать применение дополнительных аксессуаров.


Подготовка к сканированию
Установка 3D-сканера и сфер
В начале нашей съемки мы устанавливаем четыре сферы, которые будут являться базовыми. Пять оставшихся мы используем как подвижные мишени, переставляя их вместе со сканером. При этом необходимо следить, чтобы у соседствующих станций хотя бы три мишени были в зоне сканирования.
Так сферы выглядят в установленном виде:

Здесь я показываю быстросъемные крепления, благодаря которым сканер легко фиксируется:

Начало работы с 3D‑сканером
Создание проекта и настройка
Первое, что мы делаем при начале работы со сканером, – создаем проект и присваиваем ему название. В проекте можно соблюдать иерархию, т.е. записывать данные в уже существующий проект либо создавать новый.
Иерархия структуры проекта:

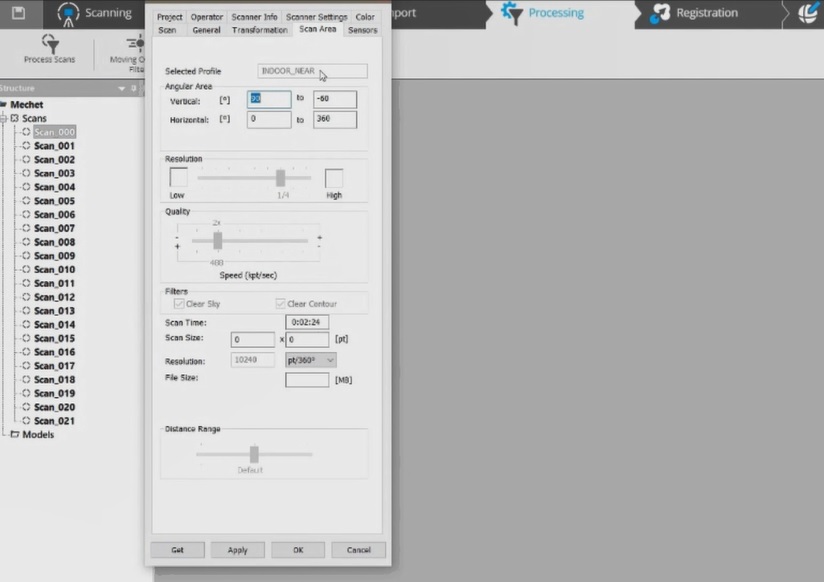
На этом этапе мы включаем дополнительные элементы управления. Поскольку мы работаем на открытой местности, то включаем GPS. Данные со спутника позволяют спозиционировать станции, и их последующая сшивка будет значительно упрощена.

Следующие настройки – плотность сканирования, качество фильтрации и различные настройки камеры. Все это делается достаточно быстро, легко, и в принципе мы уже готовы начинать сканировать.

Дальше просто нажимаем кнопку «Старт».
Процесс сканирования
Прибор делает обороты вокруг своей оси, замеряет дальность, записывает углы, делает фотоснимки – все в автоматическом режиме.
По завершении сканирования нам будет выдан панорамный снимок, на котором мы можем указать дополнительные маркеры, их доснять либо отсканировать какую-либо отдельную область.

Так выглядит завершение этапа сканирования на станции:

Если никаких дополнительных настроек не требуется, нажимаем кнопку «Далее» и переносим сканер на новую точку.
На станции стараемся не попасть в створ прибора, чтобы не создавать лишних помех. Створ – это прорезь по его середине:

По сути, процесс работы, если настройки уже вбиты, – просто переносить сканер, нажимать «Старт» и смотреть, чтобы аппарат у нас не украли. Это фундаментально отличается от работы с тахеометром. Руки не мерзнут (мы работали при минус 12‑15 градусов и довольно сильном ветре). Работать со стилусом в таких условиях было бы не очень удобно.
Эти данные мы позже посмотрим вживую на самом проекте. Здесь я хотел показать фотореалистичность облака точек, которое сканер собирает. Вот фрагмент облака точек со сложным декором на фасаде здания:

На следующем фото обратите внимание на товарищей сзади, они у нас в процессе активно поучаствовали, создали нам определенную проблему в работе. На облаке точек потом степень их участия оценим.

Примерное расстояние между станциями – 10‑15 метров. Время на станции зависит от настроек, которые мы выбираем, т.е. снимаем ли в цвете, без цвета, используем ли HDR.
Наверное, это единственный прибор, с которым я сталкивался, с настройками фотофиксации и выбором экспозиции цвета. FARO делает большой упор на фотореалистичность снимков и на их визуализацию.
Мы подходим к финалу – возвращаемся на ту же самую точку, с которой и начинали, таким образом, замыкая круг. Всего мы сделали 21 стоянку.

Проследить за выполненной работой по сканированию мечети вы можете по видео:
Первичная обработка данных
Импорт данных в FARO SCENE
Итак, мы собрали полевые данные, приходим в офис, вставляем SD‑карту в компьютер, и программа SCENE предлагает нам импортировать проект. Начинается процедура импорта. Данные со сканера FARO достаточно оптимизированы, имеют малый вес, но тем не менее какое-то время эта процедура занимает. Также существенное количество времени занимает процессинг и непосредственно сшивка самого облака точек.
Технические характеристики ПК для работы с проектом
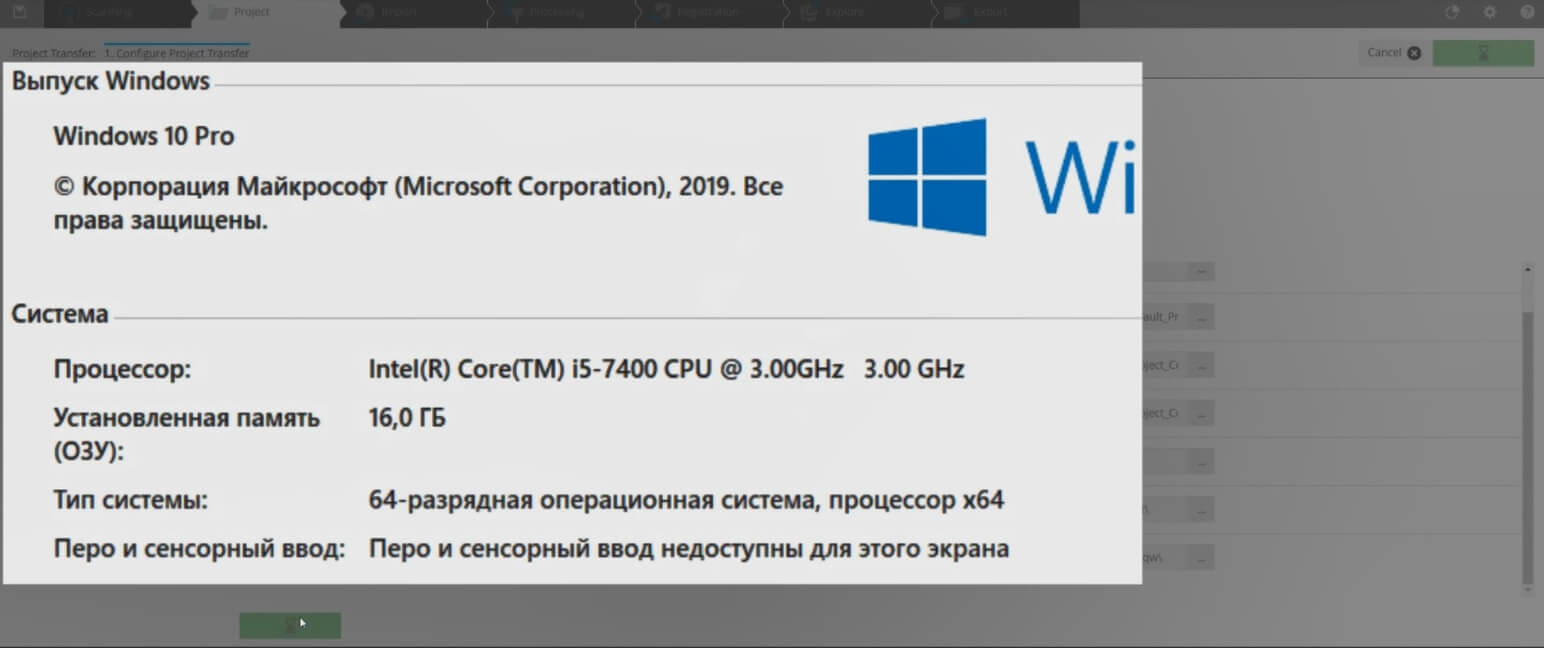
Ресурсоемкие процессы очень зависят от мощностей компьютера. Вот характеристики моего ПК:
-
процессор i5 с частотой 3 ГГц на четырех ядрах,
-
техпроцесс 14 нм и архитектурное устаревание 4 поколения;
-
16 ГБ оперативной памяти;
-
HDD с крутящим моментом 7200 rpm.
Очень средняя система для таких задач.
Импорт проекта размером 4 ГБ и процессинг заняли 10 минут, сшивка сканов – 25 минут, так как мы работали с GPS и со сферами.
Если бы программе пришлось структурировать неспозиционированные станции, то это бы заняло 30‑40 минут. При этом я видел машины, которые этот же проект соберут минут за 5 до финального результата. Эти моменты индивидуальны, но FARO позволяет работать даже на посредственных компьютерах.
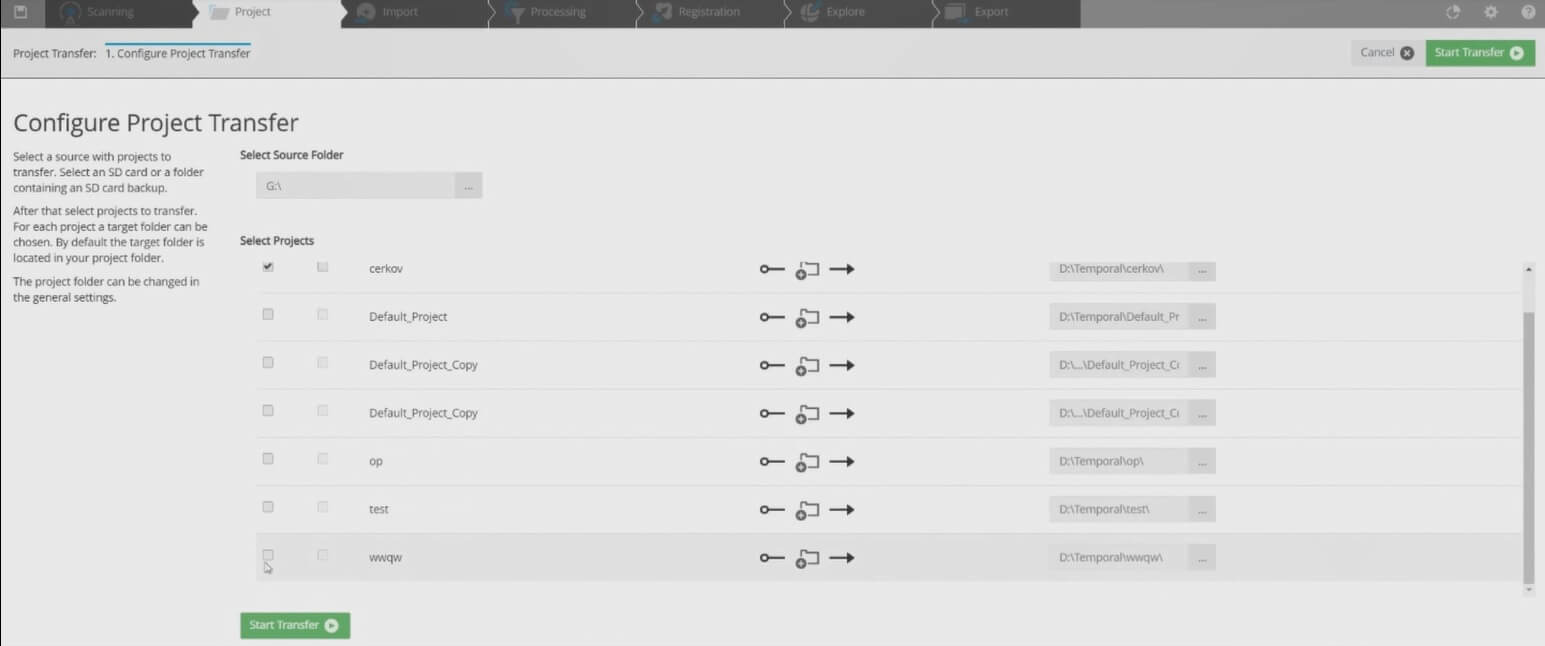
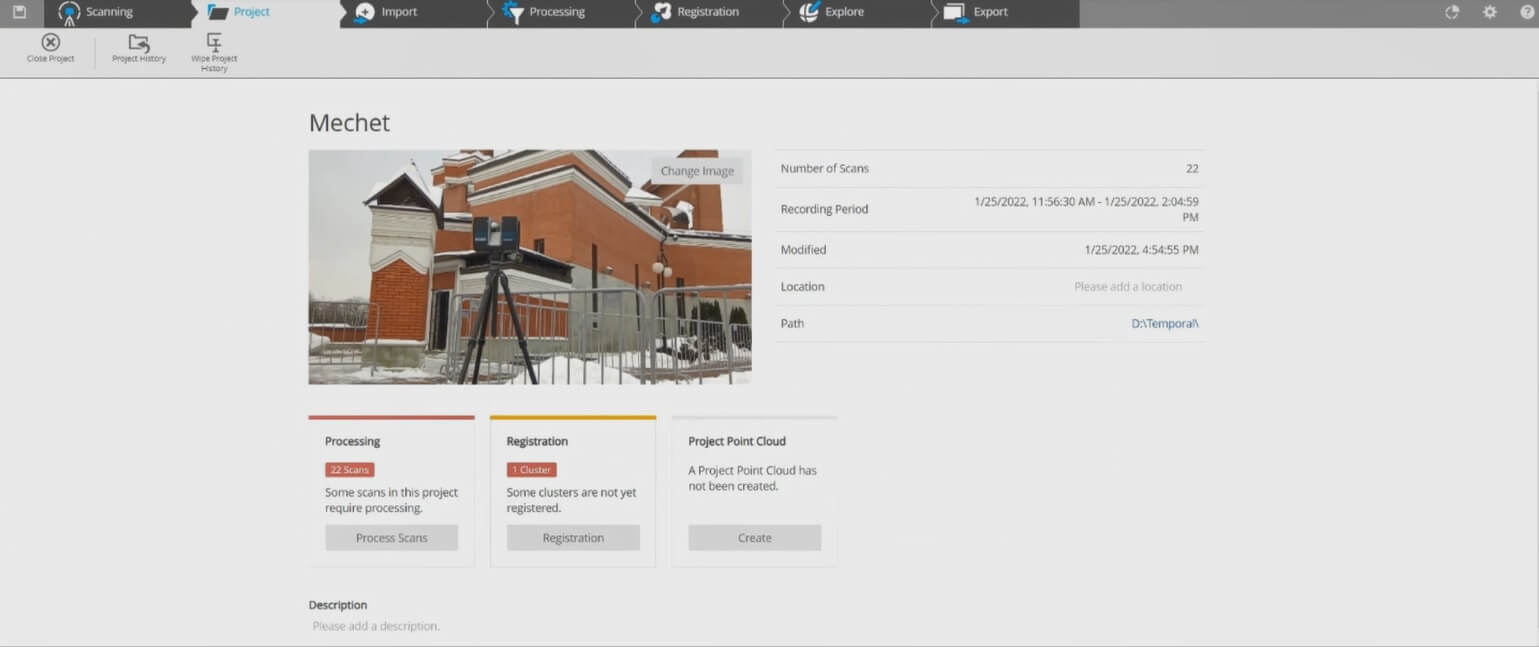
Трансфер закончен, и далее заходим в наш проект. Я поменял титул – изображение, название проекта.
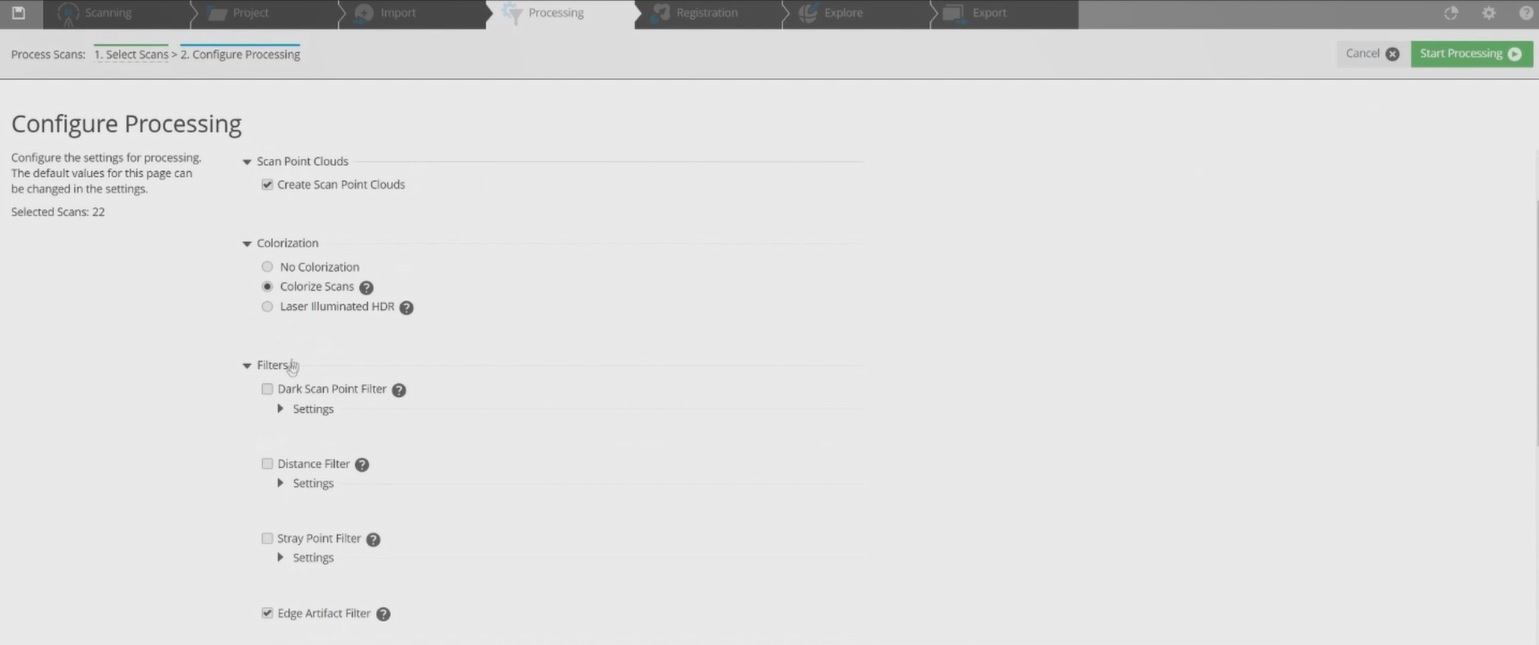
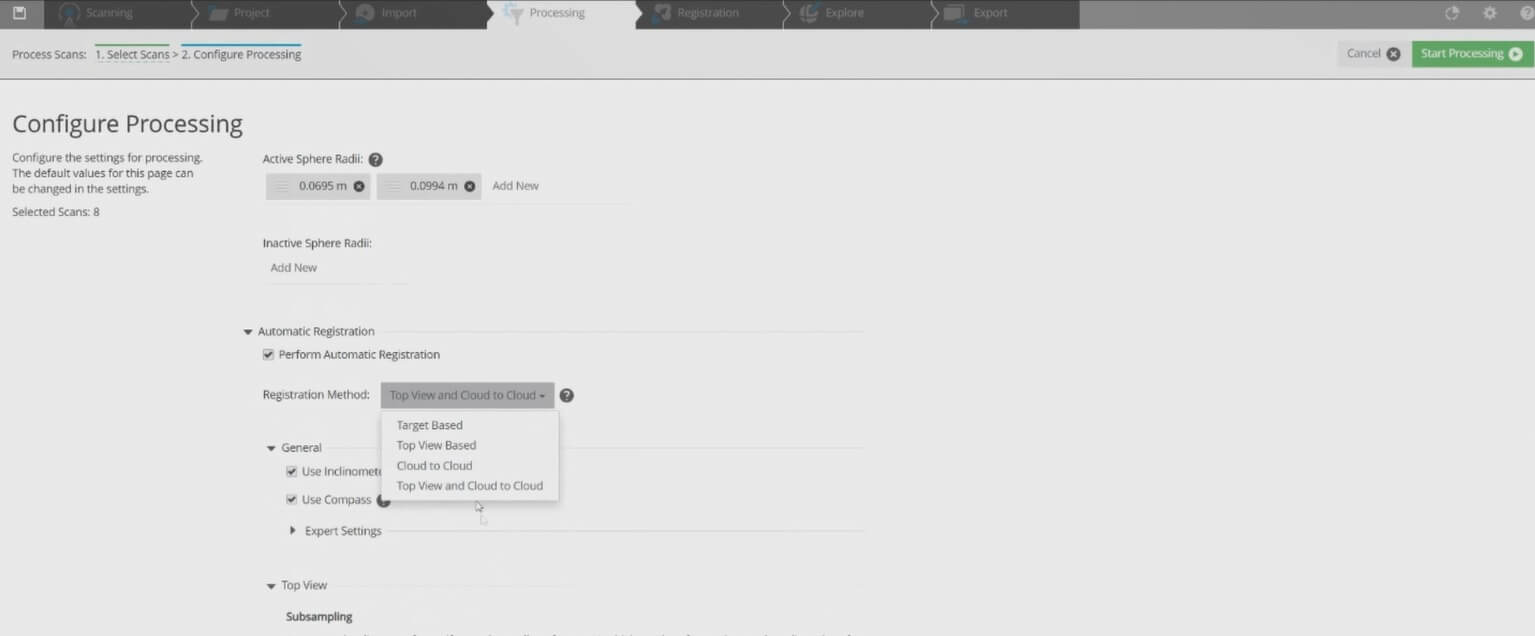
Конфигурация настроек обработки
Переходим к процессингу. Его настройки довольно обширные: раскраска цветом, фильтр по дистанции, фильтр отсечения, различные шумоподавляющие фильтры.
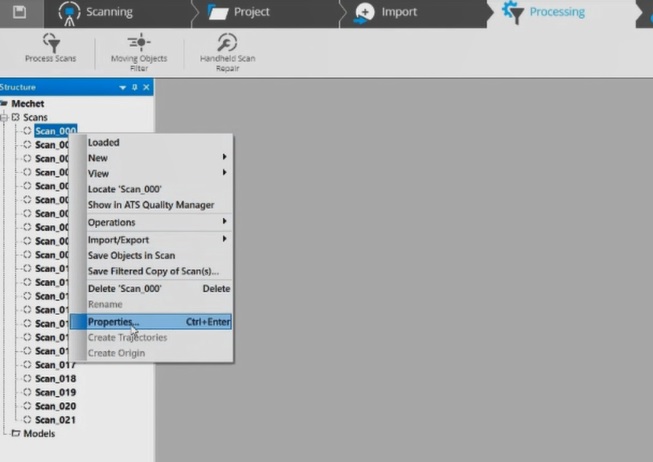
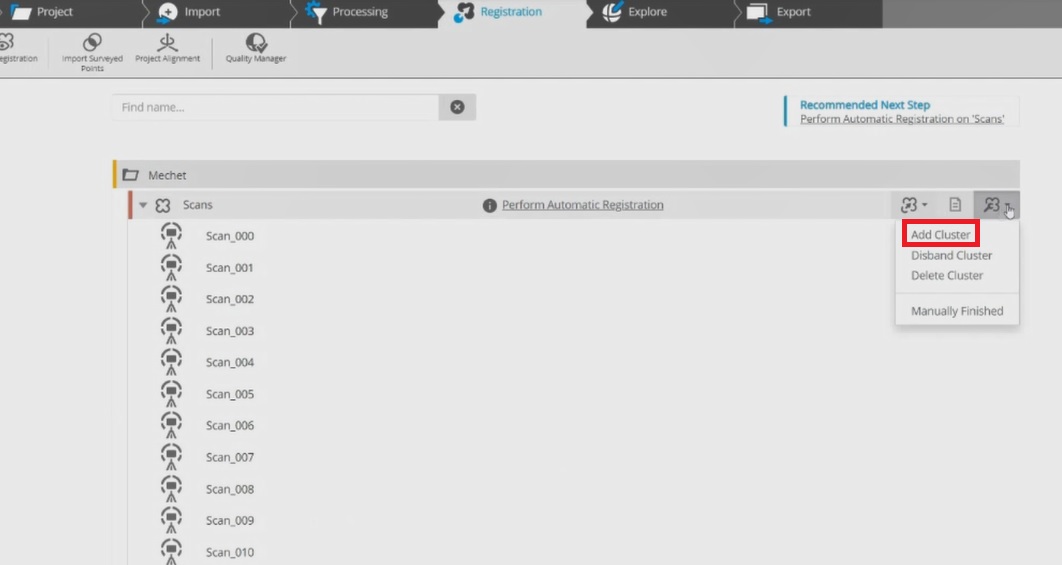
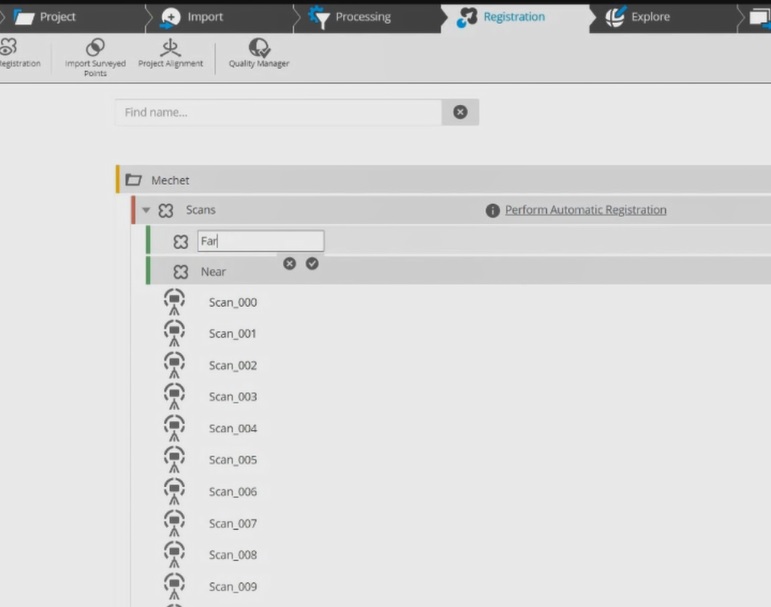
Выбор сканов (распределение станций по кластерам)
В данном проекте я делал съемку в двух кластерах, в разных предустановках, поэтому сейчас я определяю, какие станции к какому кластеру буду относить.
Создаю первый и второй кластеры:
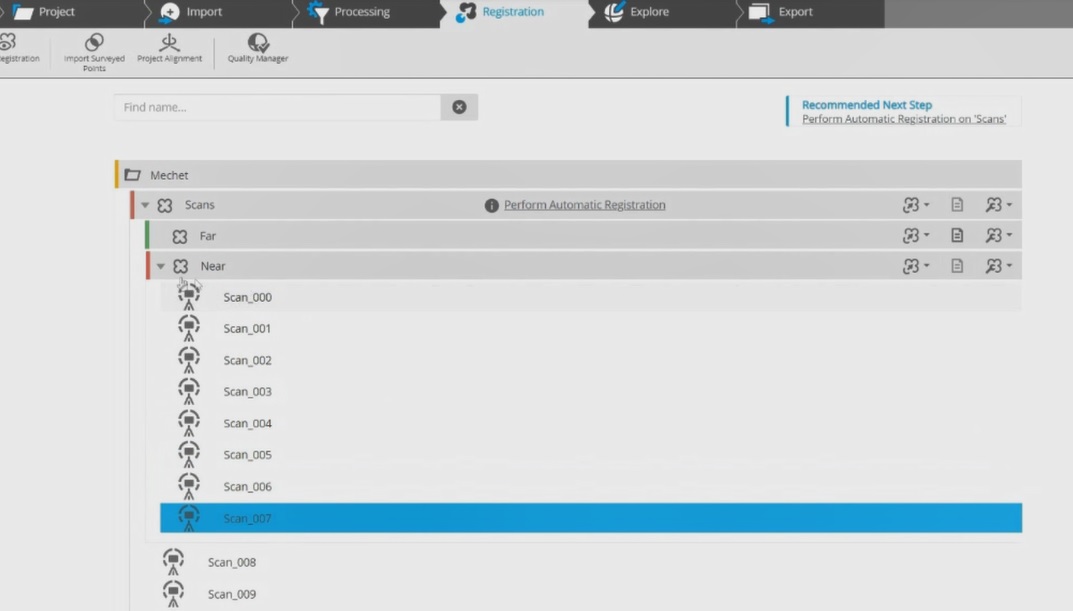
Выбор фильтрации для каждого кластера
Далее перетягиваю станции в нужный мне порядок. При процессинге применяю к каждому кластеру свои настройки.
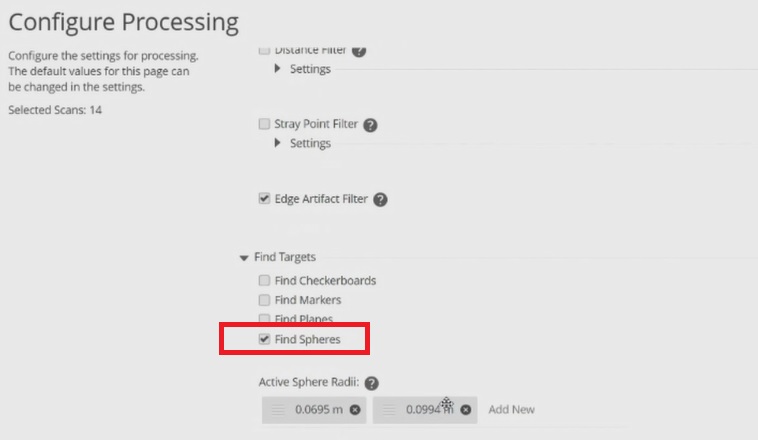
Обязательно ставим галочку «Поиск сфер» (Find Spheres), так как мы с ними работали.
Затем повторяем процедуру обработки для второй группы. Так выглядит процесс первичной фильтрации наших данных.
С этапом процессинга мы также предлагаем ознакомиться на видео:
Итак, посмотрим, сколько времени мы затратили:
-
сканирование, с учетом рекогносцировки и вынужденных простоев: 2,5 часа;
-
импорт проекта и первичная обработка: 10 минут;
-
сшивка сканов: 25 минут.
В одной из публикаций мы планируем поближе познакомиться с функционалом ПО FARO SCENE, с помощью которого выполняется объединение сканов и формирование облака точек.
Для дальнейшего моделирования на основе данных наземного лазерного сканирования вы сможете использовать следующие программные продукты FARO:
-
As-Built (включая плагины для AutoCAD и Revit) – для CAD- и BIM‑проектирования. Софт позволяет делать обмерные чертежи и строить BIM‑модели с привязкой к облаку точек и призван расширить функциональные возможности AutoCAD и Revit.
-
BuildIT Construction – для контроля качества, то есть для сравнения данных сканирования с проектной документацией.
Статья опубликована 24.03.2022 , обновлена 17.04.2025
Об авторе