


Что такое светоотражающие маркеры | Зачем нужны маркеры при 3D‑сканировании | Как размещать позиционные метки | Что еще нужно знать | Как лазерное 3D‑сканирование с метками помогает в контроле качества | Решения для сканирования без маркеров | Итоги: кратко
Что такое светоотражающие маркеры
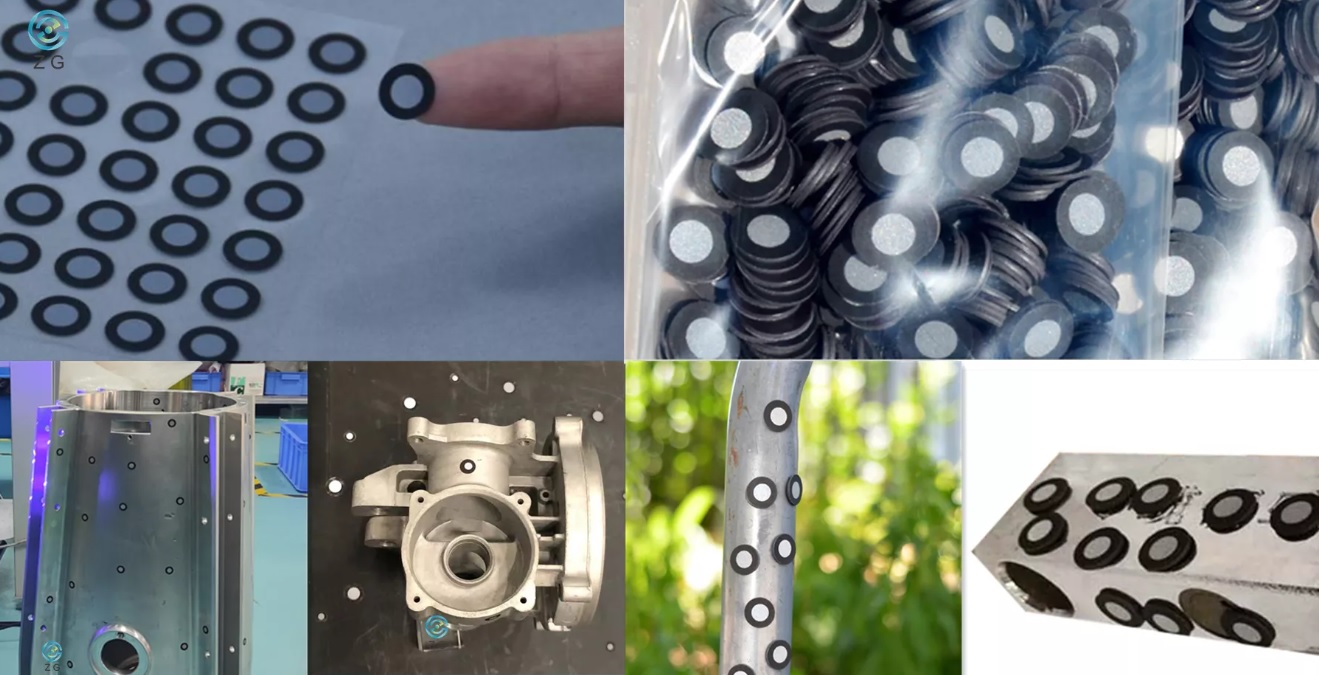
Маркеры (или позиционные метки) – это небольшие наклейки или магниты с круглой светоотражающей областью в центре и черным внешним кольцом. Они размещаются на объекте сканирования или рядом с ним перед началом оцифровки. 3D‑сканер легко обнаруживает эти высококонтрастные «цели» и определяет свое местоположение в пространстве, что является ключом к портативности устройства и динамической привязке.
В лазерных 3D‑сканерах светоотражающие метки используются для отслеживания в реальном времени, что позволяет выполнять 3D‑сканирование быстро и точно. Во время захвата данных, когда 3D‑сканер последовательно обнаруживает маркеры на поверхности объекта, программное обеспечение сканера распознает и анализирует каждый маркер в режиме реального времени.
Посмотрим, как работать с метками на примере ручных лазерных сканеров ZG Technology. Для позиционирования каждого кадра сканирования используется массив данных с минимум четырьмя метками. По мере перемещения сканера вокруг объекта программное обеспечение ZGScan записывает точное расположение каждого кадра относительно остальных и использует эту информацию для совмещения данных при 3D‑рендеринге в ПО в режиме реального времени.
После сканирования светоотражающие маркеры можно без труда удалить в процессе редактирования данных. Кроме того, маркеры могут использоваться в качестве опорных точек для объединения двух сканов.
Чаще всего используется два вида светоотражающих меток:
-
Маркеры-наклейки: имеют клейкую обратную сторону, наклеиваются на объект и легко удаляются вручную.
-
Магнитные маркеры: размещаются на поверхностях из магнитных материалов, таких как железо или сталь. Они многоразовые, с легкостью прикрепляются к объекту и снимаются с него.
Зачем нужны маркеры при 3D‑сканировании
3D‑сканеры можно классифицировать по одному из их основных признаков – методу позиционирования. Лазерные устройства проецируют множество лазерных линий на сканируемый объект, в то время как сканеры структурированного (или белого) подсвета проецируют светотеневые узоры. И те, и другие получают изображения и анализируют специфическую деформацию проекции на объекте для извлечения 3D‑данных.
Данные сканирования отображаются в виде облака точек или сетки треугольников. По мере того как сканер перемещается вокруг объекта, различные массивы данных сканирования приводятся к общей системе координат, где данные объединяются в законченную модель. Этот процесс называется совмещением или регистрацией, он может выполняться в режиме реального времени в процессе сканирования или на этапе постобработки.
Применение светоотражающих маркеров решает две отдельные проблемы 3D‑сканирования: сложность точного совмещения данных сканирования и сложность достижения высокой точности при оцифровке крупных объектов.
Если у вас есть вопросы о выборе или применении 3D‑сканеров, задайте их нашим экспертам онлайн
Сложность точного совмещения данных сканирования
Как известно, 3D‑сканеры структурированного (или белого) подсвета могут генерировать полную 3D‑поверхность объекта без использования светоотражающих маркеров. В них реализованы сложные алгоритмы, которые совмещают данные отсканированных изображений на основе геометрии объекта. Однако это не гарантирует отличных результатов, и во многих случаях, особенно при работе с объектами с большой плоской поверхностью и без уникальных геометрических особенностей, даже самый сложный алгоритм может подвести.
Представьте себе сканирование стального листа длиной 8 метров и шириной 6 метров – геометрия его поверхности не имеет никаких особенностей. Размещение светоотражающих маркеров на поверхности стального листа может дать 3D‑сканеру «постоянную особенность» для отслеживания, что позволяет программному обеспечению сканера регистрировать все кадры сканирования для массивов 3D‑данных и совмещать эти массивы для формирования полных данных 3D‑сканирования. При отсутствии меток прибор не справится с совмещением, и ПО не будет знать, как совместить кадр 1 с кадром 2, кадр 2 – с кадром 3, и так далее.
Хотите повысить квалификацию и стать специалистом в сфере 3D-технологий? В учебном центре ITERBI вы можете пройти различные курсы по обработке данных 3D-сканирования, например, по обратному проектированию в Geomagic Design X.
Сложность достижения высокой точности при оцифровке крупных объектов
Во время сканирования, когда 3D‑сканер обнаруживает светоотражающие маркеры на поверхности объекта, он определяет свое местоположение в пространстве на основе положения относительно объекта – это называется самопозиционированием или динамической привязкой. Поскольку сканер перемещается вокруг объекта, по мере увеличения диапазона сканирования может накапливаться погрешность, особенно при измерении крупногабаритных изделий. Минимизировать накопление погрешности можно с помощью фотограмметрии и светоотражающих меток.
Перед сканированием выполняется процесс, называемый предварительным моделированием, для получения общей структуры сканируемого изделия. Используя систему фотограмметрии для фотографирования светоотражающих маркеров на поверхности большого объекта, можно выполнить триангуляцию маркеров на изображениях для определения их местоположения в трехмерном пространстве. Когда данные меток импортируются в ПО сканера, это помогает обеспечить целостность данных сканирования, чтобы быстро сгенерировать исключительно точные и повторяемые 3D‑данные крупных объектов.
Как размещать позиционные метки
Для размещения меток оператору необходимо обратить внимание на следующие моменты.
Размещение маркеров на объекте
Светоотражающие маркеры должны покрывать всю поверхность объекта, старайтесь размещать их на плоской поверхности. Если условия ограничены, прикрепляйте маркеры на менее изогнутой области, насколько это возможно. Значительная деформация меток повлияет на точность сканирования.
Для нормальной работы сканеров ZG в каждом кадре должно быть видно не менее четырех светоотражающих маркеров. Для сканирования в стандартном и широкодиапазонном режиме оператор может использовать маркеры диаметром 6 мм, устанавливая их на расстоянии 60‑100 мм друг от друга. Для участков, требующих сверхвысокого разрешения, используйте позиционные метки диаметром 3 мм и размещайте их на расстоянии 20‑50 мм.
Размещение меток вокруг объекта
Если деталь слишком мала или маркеры нельзя наклеить на поверхность детали, доступен вариант их размещения вокруг объекта. В этом случае убедитесь, что относительное положение маркеров и объекта остается неизменным во время сканирования.

Меры предосторожности при использовании светоотражающих маркеров
-
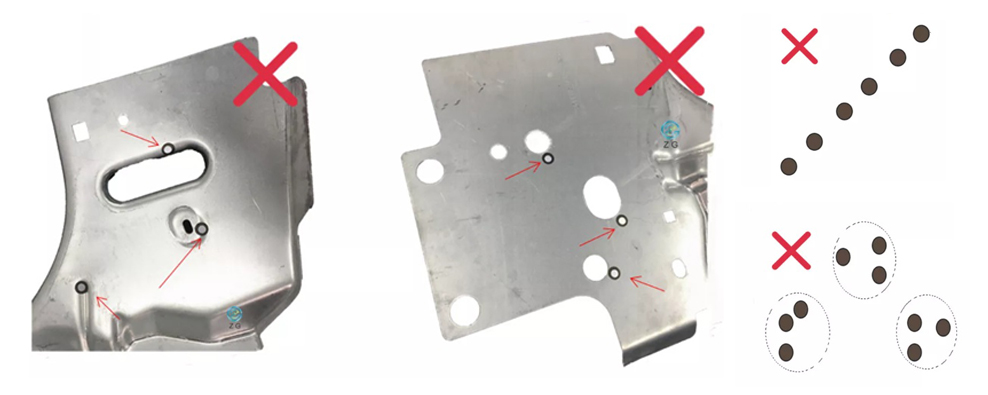
Не размещайте метки на поверхности с большой кривизной.
-
Не устанавливайте их вблизи края или какой-либо детали объекта (<4 мм).
-
Не наклеивайте маркеры аккуратно в линию или на одинаковом расстоянии (сканер не сможет выполнить точные расчеты).
-
Не размещайте маркеры в правильных формах, таких как треугольники или квадраты.
-
Не используйте поврежденные, неполные, жирные или грязные маркеры.
Что еще нужно знать
Иногда светоотражающий маркер может быть не распознан при сканировании под большим углом. То есть если вы сканируете вокруг области изгиба (например, от переднего бампера автомобиля до задней двери), постарайтесь разместить больше маркеров в поле зрения.
Программное обеспечение устройств ZGScan и HyperScan отображает количество меток, видимых 3D‑сканером в режиме реального времени. Если вы не уверены, достаточно ли маркеров вы наклеили, включите сканер и нажмите «Scan Markers» в программе: вы увидите, сколько маркеров распознает сканер в каждом кадре и нужно ли добавить больше.
Читайте в блоге: 4 задачи реверс‑инжиниринга, которые быстро решит 3D‑сканер
Как лазерное 3D‑сканирование с метками помогает в контроле качества
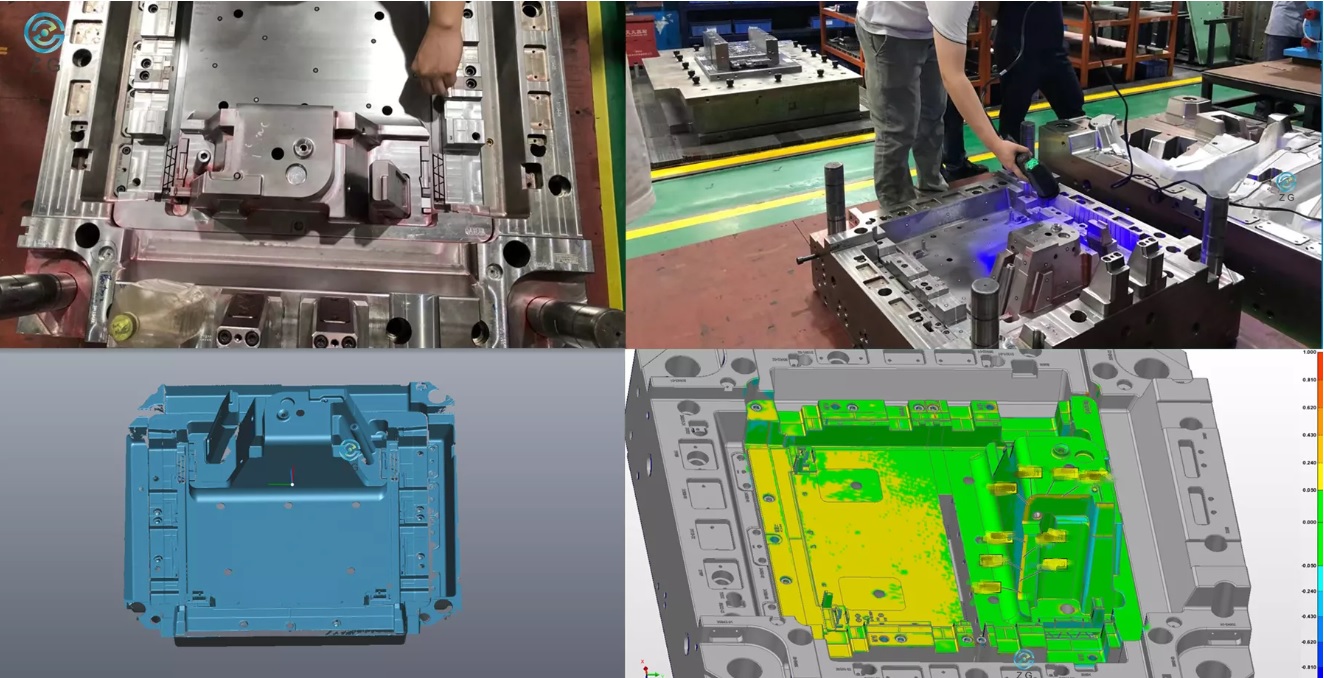
Пресс-формы для литья под давлением нуждаются в строгом и регулярном техническом обслуживании. После проведения необходимых восстановительных работ они должны иметь те же размеры и точность, что были заложены в проект изначально.
С помощью универсального 3D‑сканера метрологического класса ZG AtlaScan мы можем сначала отсканировать маркеры на пресс-форме, чтобы получить общую форму всего изделия и пространственные данные маркеров, которые можно импортировать в ПО, и отсканировать поверхность пресс-формы. В процессе оцифровки поверхности данные сканирования автоматически совмещаются с импортированными данными маркеров. Данные сканирования целостны и чрезвычайно точны. Затем эта информация сравнивается с оригинальной CAD‑моделью для создания цветовой 3D‑карты и отчета о контроле геометрии. Так инженеры могут узнать, нуждается ли пресс-форма в ремонте или нет.
Вот как выглядит весь процесс.
-
Разместите достаточное количество светоотражающих меток на поверхности пресс-формы.
-
Подключите AtlaScan к источнику питания и прогрейте его в течение 20 минут.
-
Нажмите кнопку «Scan Markers» в программе ZGScan, захватите все маркеры на поверхности пресс-формы и экспортируйте данные маркеров.
-
Нажмите «Import Markers», чтобы импортировать данные маркеров в программное обеспечение ZGScan.
-
Нажмите «Scan Surface» и приступайте к сканированию поверхности пресс-формы.
-
Обработайте данные сканирования и сохраните их в формате .stl.
-
Импортируйте данные сканирования в программное обеспечение сторонних производителей для формирования цветовой 3D‑карты и отчета.
Решения для сканирования без маркеров
Клиенты постоянно спрашивают: «Нужно ли нам размещать маркеры на детали?» или «Есть ли способ сэкономить время при установке меток?». Светоотражающие маркеры способствуют быстрому и точному 3D‑сканированию, хотя иногда их применение увеличивает время подготовки к работе и создает ограничения по размеру объектов, которые могут быть эффективно измерены.
Компания ZG Technology продолжает совершенствовать свои высококачественные продукты и представляет две системы, позволяющие сканировать без маркеров, экономить время и существенно повысить эффективность сканирования.
Лазерный 3D-сканер HyperScan с оптическим отслеживанием

Умный лазерный 3D‑сканер с оптическим отслеживанием HyperScan использует технологию синего лазера с несколькими рабочими режимами. Аппаратная часть HyperScan состоит из оптического трекера и ручного лазерного 3D‑сканера с жесткой рамой с нанесенными на ней метками. В процессе сканирования оптический трекер отслеживает маркеры на сканере и определяет положение сканера в пространстве. Таким образом, нет необходимости размещать позиционные метки на измеряемой детали, и это не только повышает удобство работы с ручным устройством, но и позволяет выполнить мгновенное сканирование на месте.
MarvelScan: лазерное 3D‑сканирование без трекера и меток

ZG MarvelScan, первый в мире портативный лазерный 3D‑сканер, не требующий трекера и маркеров, – революционный продукт, призванный повысить эффективность портативного сканирования. Благодаря уникальной технологии позиционирования монокуляра Inside-Out во время всего процесса сканирования оператору вообще не нужно использовать маркеры. По сравнению с другими системами с оптическим отслеживанием, MarvelScan обходится без жесткой рамы с маркерами вокруг сканера или оптического трекера, что повышает портативность и значительно упрощает процедуру калибровки.
Итоги: кратко
С помощью светоотражающих маркеров 3D‑сканеры все чаще используются для получения полных или частичных трехмерных измерений любого физического объекта. 3D‑сканеры могут генерировать миллионы точек в секунду, их эффективность намного выше по сравнению с традиционными инструментами, выполняющими измерения «по точкам». Вместе с тем ZG Technology также предлагает решения, вообще не требующие размещения меток на поверхности объекта.
Материал предоставлен компанией ZG Technology

Статья опубликована 26.01.2023 , обновлена 07.04.2026




